Wheeled Robot Motion Control with Raspberry Pi & Python

Wheeled Robot Motion Control with Raspberry Pi & Python
.MP4, AVC, 1280x720, 30 fps | English, AAC, 2 Ch | 2h 24m | 2.03 GB
Instructor: Sotirios Stasinopoulos
.MP4, AVC, 1280x720, 30 fps | English, AAC, 2 Ch | 2h 24m | 2.03 GB
Instructor: Sotirios Stasinopoulos
Create a four-wheel robot based on the RaspberryPi and program its real or simulated motion using Python commands
What you'll learn
Wheeled Robot Assembly
Python Programming Basics
Wheeled Robot Motion Control with Raspberry Pi and Python
Working with Virtual Robot Simulations
Requirements
Basic Computer Usage (Typing, Internet Browsing)
Use Robociti online platform for robotics programming and simulations
Description
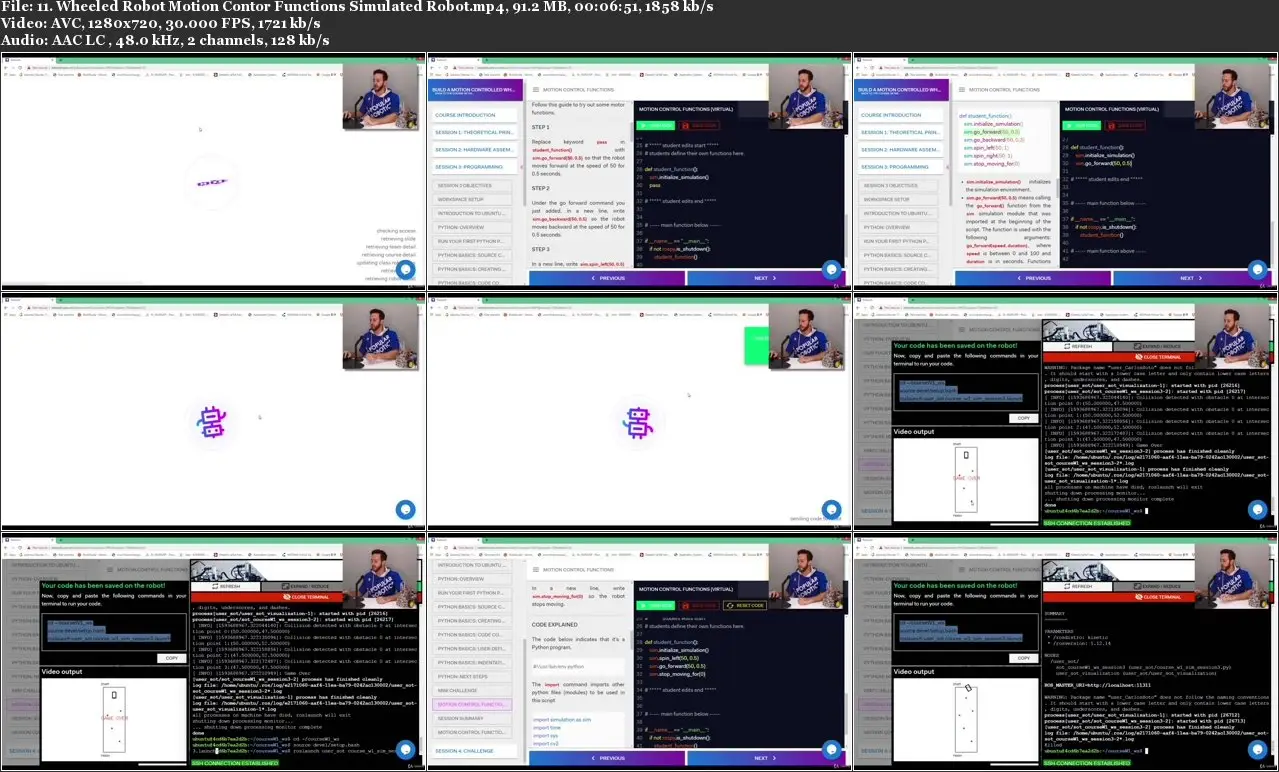
In this course, students will create a wheeled robot similar to the robotic rovers sent to explore planet Mars by NASA, such as Mars Rovers Opportunity and Curiosity, and will make it go through a challenging course. At first, students are given an introduction about the Mars Rover and wheeled robots in general, including its motors and processing unit, letting students identify these building blocks. Then, they are taught how to build the four-wheel robot, assembling its components together, including the Raspberry Pi and others.
Afterwards, students are introduced to the software architecture of Linux Ubuntu and ROS that is commonly used in wheeled robots, and learn the basic skills of the Python programming language that are going to be needed in this course. Then, the robot is connected to the programming environment and students program the basic motion of the robot using predefined functions given in Python libraries. Finally, the students can combine these functions to complete the motion control of the robot within a real or simulated environment to reach a goal location.
Who this course is for:
Beginners in Robotics-AI
Beginner Python Developers
Robotics Hobbyists
Wheeled Robot Motion Control with Raspberry Pi & Python