


OpenPaths 2025 (25.00.01.06)

OpenPaths 2025 (25.00.01.06) | 2.6 Gb
Bentley has released OpenPaths 2025 (25.00.01.06) is a harmonized product line combining trusted transport modeling software with new technology and generational advances to help achieve a transport modeling roadmap. OpenPaths includes, and is the exclusive home for CUBE, EMME, AGENT and DYNAMEQ products.
OpenPaths 2025 Release Summary
OpenPaths 2025 (v25.00.00) introduces new features and accumulated maintenance across all OpenPaths applications.
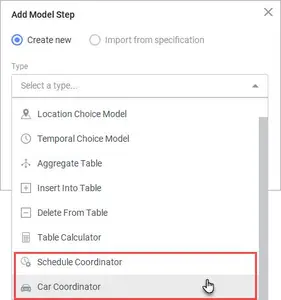
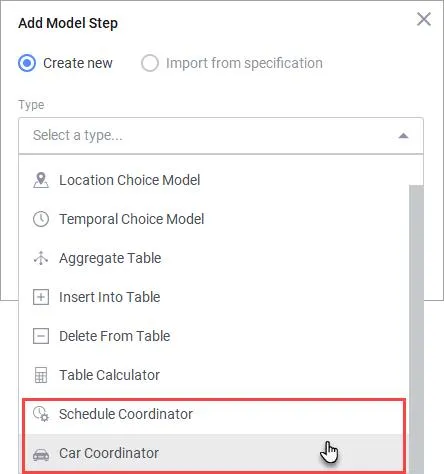
OpenPaths AGENT introduces new, sought-after activity-based modeling (ABM) features including a new Car coordinator to allocate private car use (including EV and AV) across household trips, and a new Schedule coordinator to resolve schedule inconsistencies by re-scheduling trips that do not respect time-space constraints. AGENT also includes up to 4x speedups for aggregate model steps, enhanced Location choice modeling, and a new utility tracing feature available via API.
OpenPaths CUBE introduces a new turn penalty editor, enhancements to the network editing workflow including keyboard accelerators, a new lock functionality to secure keys and applications from edits, a new scenario comparison table, integrated legends for layer symbology, highlighting for warning and failure messages in Voyager PRN files, and more. OpenPaths CUBE 2025 also includes integration with AGENT and Scenes, recently released in OpenPaths 2024 and 2024 Update 1.
OpenPaths EMME introduces access to scenario numbers and titles for use in Flow expressions and workflows, new options to export (and import) all flows in a Flow directory at once, and minor improvements to Junction capacity assignment tools. OpenPaths EMME 2025 also includes support for larger applications up to 20,000 zones, new transit assignment features for auxiliary modes and traffic assignment acceleration recently released in OpenPaths 2024 and 2024 Update 1.
OpenPaths DYNAMEQ provides enhancements and maintenance to simulation-based matrix adjustment, traffic control templates, import/export of DYNAMEQ networks to/from OpenPaths EMME and new layer transparencies in the simulation playback window. .
OpenPaths CityPhi now includes an Opacity parameter which makes it possible to add transparency to layers to better view basemaps behind data. This functionality is also available in Scenes (OpenPaths EMME and OpenPaths CUBE) and the OpenPaths DYNAMEQ animation window.
New Activity-based Modeling features (AGENT)
AGENT now includes two new model steps: a new Car coordinator to allocate private car use (including EV and AV) across household trips, and a new Schedule coordinator to resolve schedule inconsistencies by re-scheduling trips that do not respect time-space constraints.
![OpenPaths 2025 (25.00.01.06)]()
Car coordinator – Allocate private car use across household trips (AGENT)
The new Car coordinator model step allocates household-owned cars to car trips by selecting the vehicle allocation which maximizes the specified household utility, ensuring time-space constraints.
The procedure ensures that a vehicle will not be used more than once at the same time by members of the same household, given the following considerations:
- Utility of having car access for each trip in the household
- Car repositioning and parking options, for example for connected/autonomous vehicles (AV) which may involve empty car trips i.e. zero occupancy trips.
- Car type preferences for trips to accommodate preferences for certain trips, for example where electric vehicle (EV) may be penalized for long-distance trips.
- Possibility to coordinate minor adjustments to household trip schedules for better car availability across competing trips.
![OpenPaths 2025 (25.00.01.06)]()

![OpenPaths 2025 (25.00.01.06)]()
![OpenPaths 2025 (25.00.01.06)]()
Schedule coordinator — Reschedule trips to ensure time-space constraints (AGENT)
The new Schedule Coordinator model step resolves inconsistencies in trip schedules by optimizing trip departure, trip arrival and/or activity duration times across household trips, subject to specified time-space constraints and re-scheduling penalties.
For activity-based (ABM) or other disaggregate travel demand models, it is common that the preliminary schedule generated for a person may result in inconsistencies with respect to activity duration and/or travel time. The Schedule coordinator model step may be used to resolve these inconsistencies, as shown below:
![OpenPaths 2025 (25.00.01.06)]()
Schedule coordinator is also an essential procedure to ensure consistent vehicle trip departure times for dynamic traffic assignment (DTA).
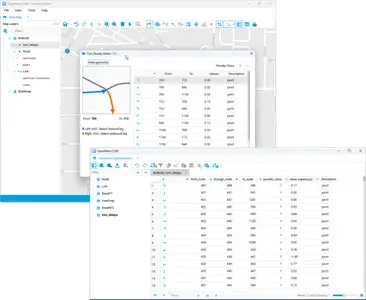
Turn penalty editor (CUBE)
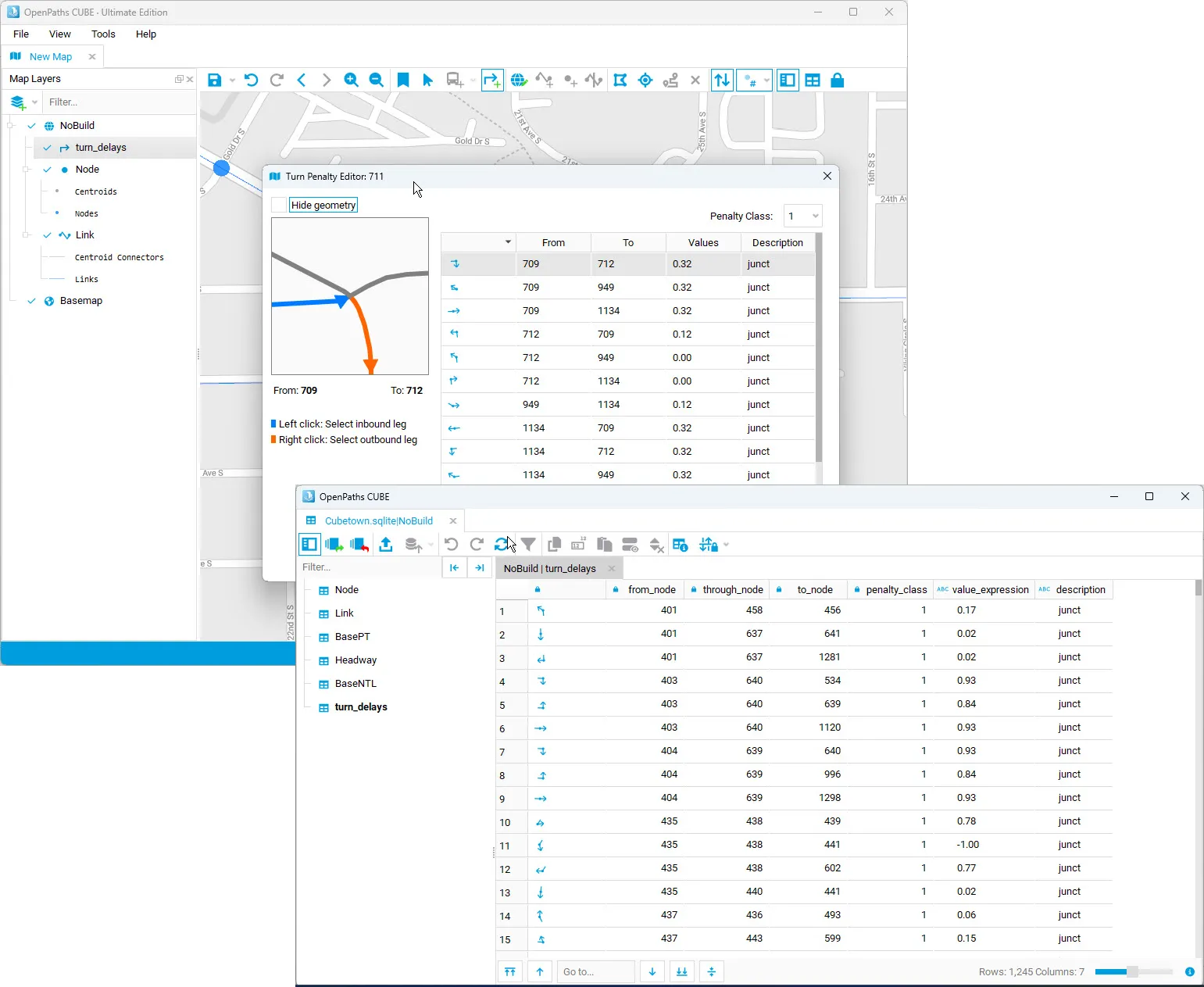
A new turn penalty editor for creating and updating turn penalty data directly from the map view in the GIS window, the standalone dialog, or the table editor.
![OpenPaths 2025 (25.00.01.06)]()
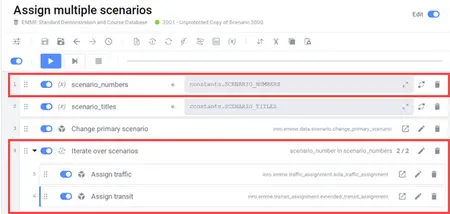
Access to scenarios in Flow expressions (EMME)
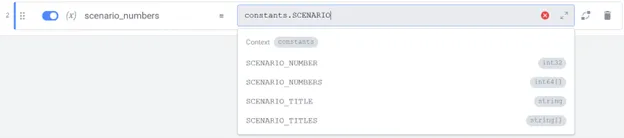
When creating an expression in Flow, it is now possible to access scenario numbers and titles using the constants relation:
- constants.SCENARIO_NUMBERS contains a list of scenario numbers (as integers).
- constants.SCENARIO_TITLES contains a list of scenario titles (as strings).

![OpenPaths 2025 (25.00.01.06)]()
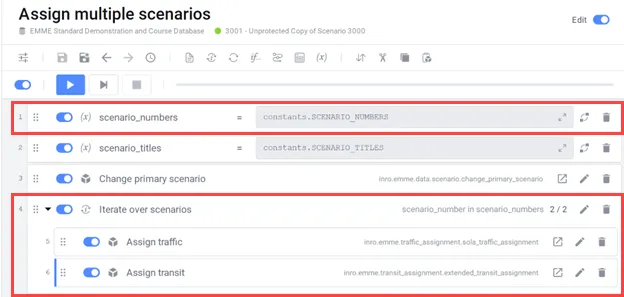
This is particularly useful to initialize all scenarios when setting up a model, or to run a model across all existing scenarios without having to enumerate them manually.
![OpenPaths 2025 (25.00.01.06)]()
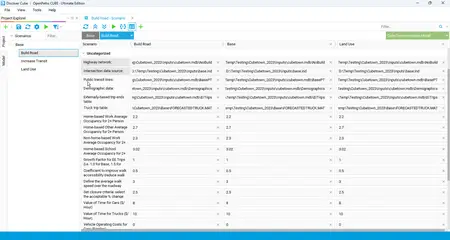
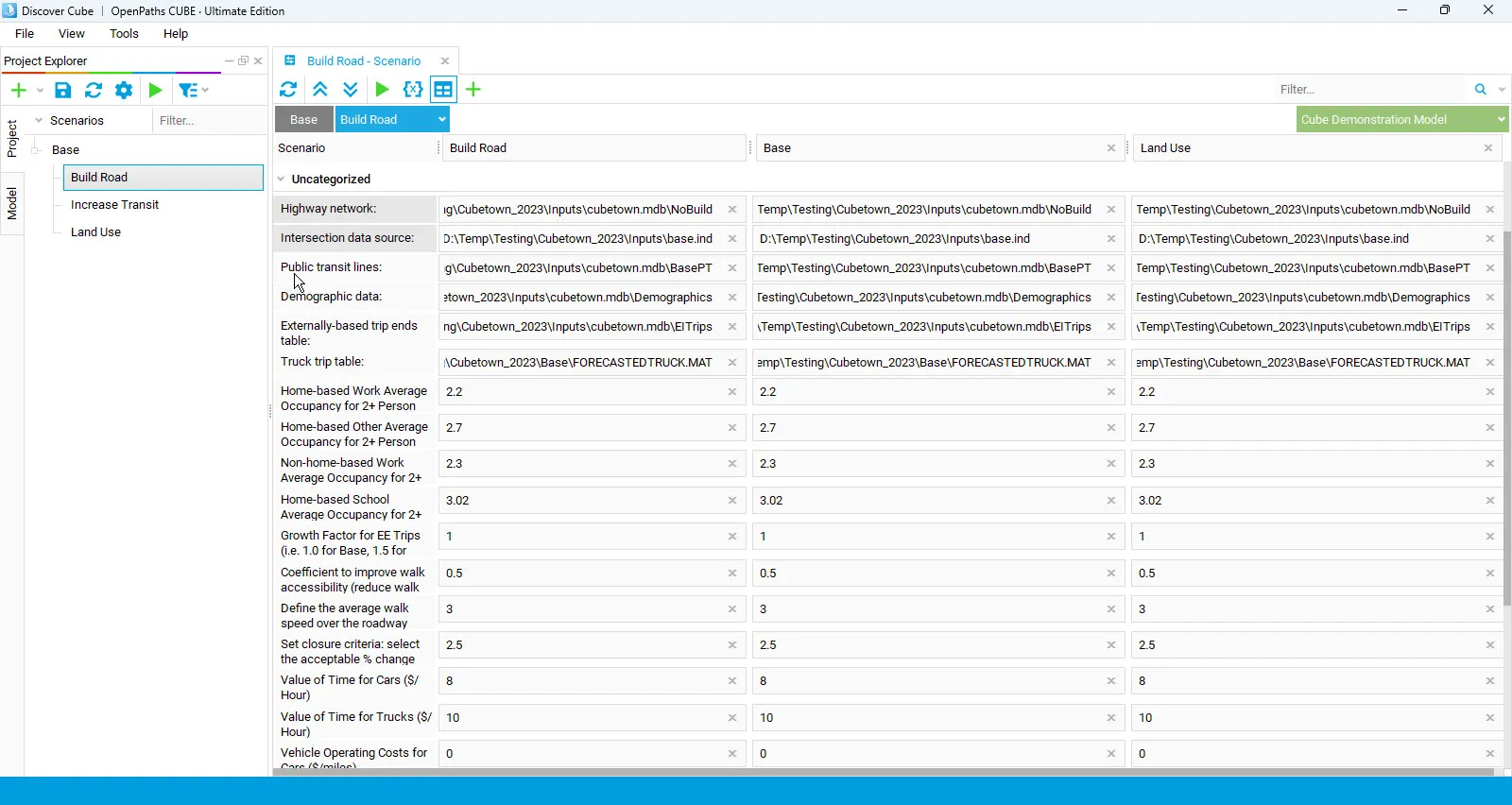
Scenario comparison table (CUBE)
The new scenario comparison table lets users quickly compare and edit key values across multiple scenarios by copying and pasting between table cells.
![OpenPaths 2025 (25.00.01.06)]()
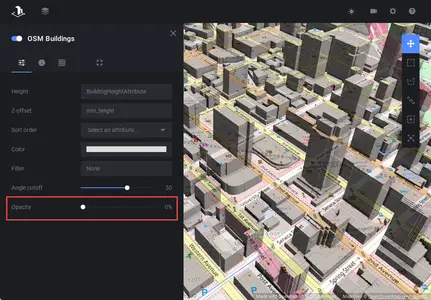
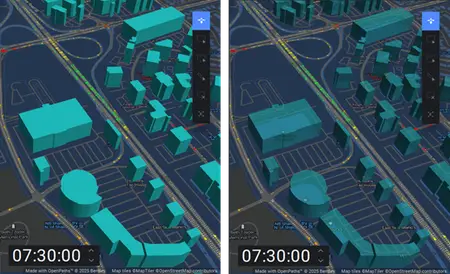
Buildings and Polygon Transparency (Scenes)
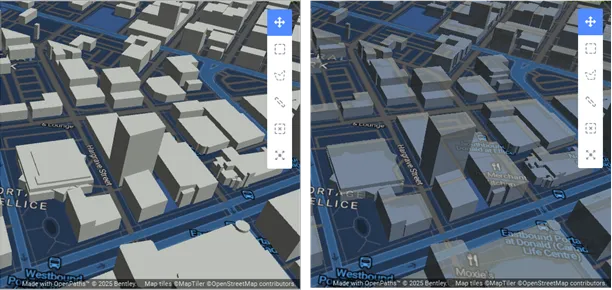
A new Opacity parameter is now available for polygon layers to add transparency to better view basemaps behind data in Scenes (EMME and CUBE), Animation window (DYNAMEQ), and CityPhi.
![OpenPaths 2025 (25.00.01.06)]()
In the CityPhi example above, the Opacity parameter is set to 0% for maximum transparency. Note that basemap details including street names, points of interest and road direction arrows are now visible even through building polygons.
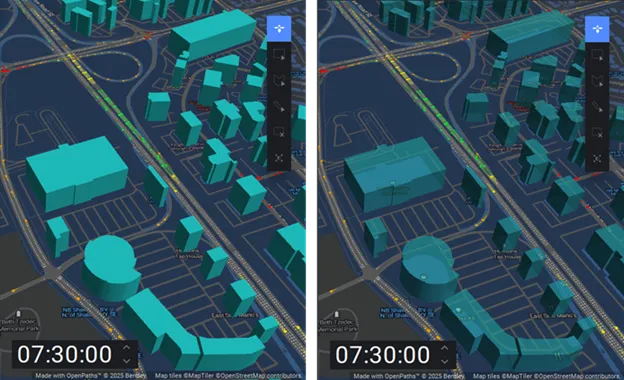
Other similar examples are presented, comparing no transparency (left-side) with transparency (right-side).
![OpenPaths 2025 (25.00.01.06)]()
![OpenPaths 2025 (25.00.01.06)]()
![OpenPaths 2025 (25.00.01.06)]()
![OpenPaths 2025 (25.00.01.06)]()
AGENT now includes two new model steps: a new Car coordinator to allocate private car use (including EV and AV) across household trips, and a new Schedule coordinator to resolve schedule inconsistencies by re-scheduling trips that do not respect time-space constraints.
OpenPaths 2025 (25.00.01.06)
Car coordinator – Allocate private car use across household trips (AGENT)
The new Car coordinator model step allocates household-owned cars to car trips by selecting the vehicle allocation which maximizes the specified household utility, ensuring time-space constraints.
The procedure ensures that a vehicle will not be used more than once at the same time by members of the same household, given the following considerations:
- Utility of having car access for each trip in the household
- Car repositioning and parking options, for example for connected/autonomous vehicles (AV) which may involve empty car trips i.e. zero occupancy trips.
- Car type preferences for trips to accommodate preferences for certain trips, for example where electric vehicle (EV) may be penalized for long-distance trips.
- Possibility to coordinate minor adjustments to household trip schedules for better car availability across competing trips.
OpenPaths 2025 (25.00.01.06)
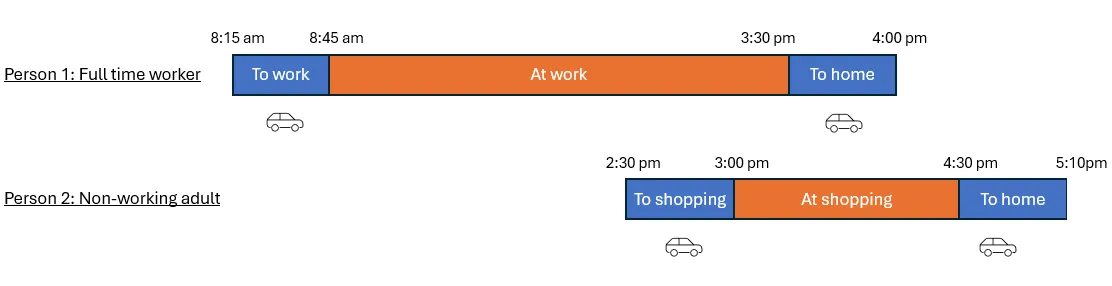
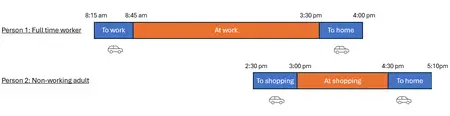
Figure 1. Without Car coordinator - Person 1 and Person 2 both choose car trips, violating household car ownership of only one (1) vehicle. This is a naive / pathological vehicle allocation.'
OpenPaths 2025 (25.00.01.06)
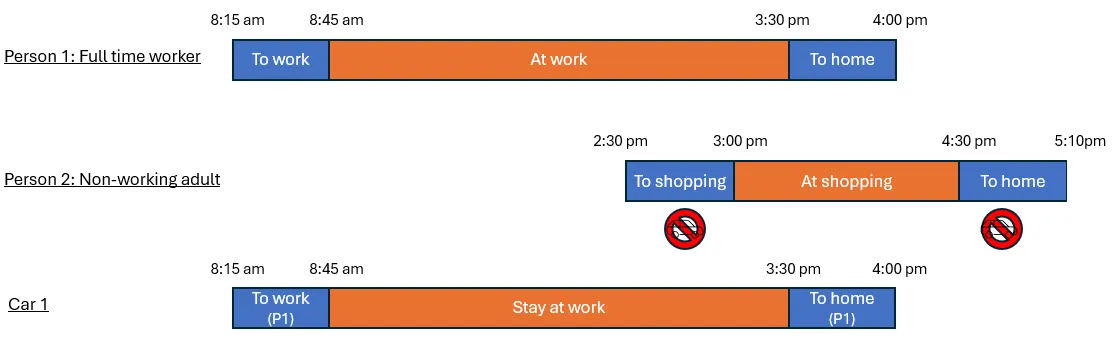
Figure 2. With Car coordinator – The household’s vehicle is allocated to Person 1, who derives more utility using the car for their work trip than Person 2 does for their shopping trip. Person 2 must select another mode for their trip.
OpenPaths 2025 (25.00.01.06)
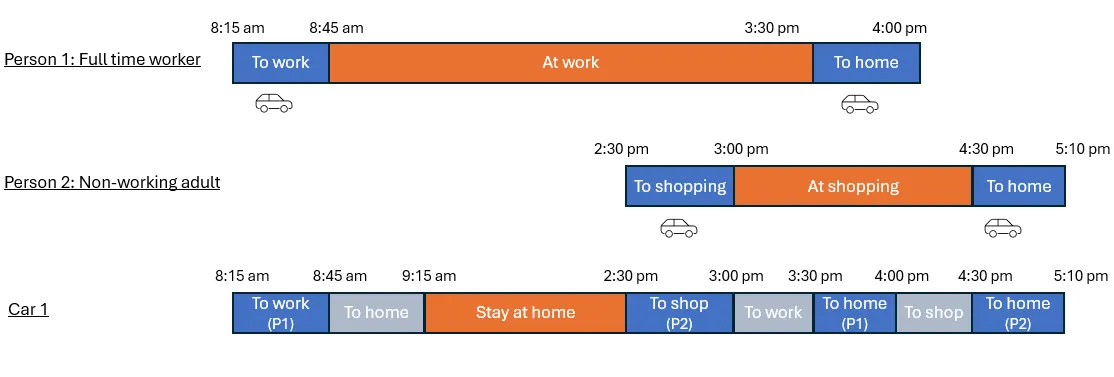
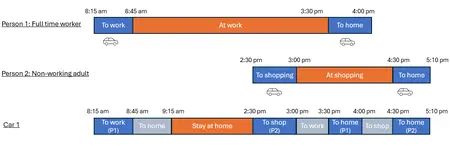
Figure 3. Car coordinator with AV - A single autonomous vehicle (AV) is able to service both Person 1’s work trip and Person 2’s shopping trip by repositioning between trips during activity durations.
Schedule coordinator — Reschedule trips to ensure time-space constraints (AGENT)
The new Schedule Coordinator model step resolves inconsistencies in trip schedules by optimizing trip departure, trip arrival and/or activity duration times across household trips, subject to specified time-space constraints and re-scheduling penalties.
For activity-based (ABM) or other disaggregate travel demand models, it is common that the preliminary schedule generated for a person may result in inconsistencies with respect to activity duration and/or travel time. The Schedule coordinator model step may be used to resolve these inconsistencies, as shown below:
OpenPaths 2025 (25.00.01.06)
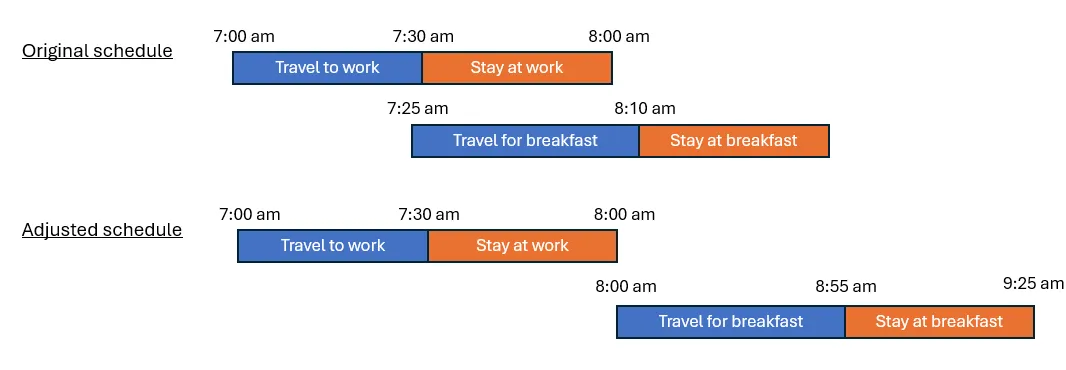
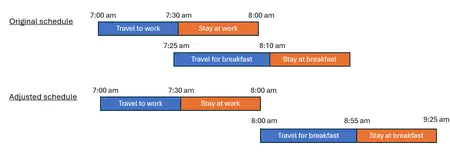
Figure 4. Without Schedule coordinator – The same person is completing a trip to breakfast while at the same time completing a work activity. Pathological schedules like this are commonly produced even in state-of-practice models. With Schedule coordinator – The adjusted schedule allows adequate time for the person to complete a work activity before departing for a breakfast trip.
Schedule coordinator is also an essential procedure to ensure consistent vehicle trip departure times for dynamic traffic assignment (DTA).
Turn penalty editor (CUBE)
A new turn penalty editor for creating and updating turn penalty data directly from the map view in the GIS window, the standalone dialog, or the table editor.
OpenPaths 2025 (25.00.01.06)
Access to scenarios in Flow expressions (EMME)
When creating an expression in Flow, it is now possible to access scenario numbers and titles using the constants relation:
- constants.SCENARIO_NUMBERS contains a list of scenario numbers (as integers).
- constants.SCENARIO_TITLES contains a list of scenario titles (as strings).
OpenPaths 2025 (25.00.01.06)
This is particularly useful to initialize all scenarios when setting up a model, or to run a model across all existing scenarios without having to enumerate them manually.
OpenPaths 2025 (25.00.01.06)
Scenario comparison table (CUBE)
The new scenario comparison table lets users quickly compare and edit key values across multiple scenarios by copying and pasting between table cells.
OpenPaths 2025 (25.00.01.06)
Buildings and Polygon Transparency (Scenes)
A new Opacity parameter is now available for polygon layers to add transparency to better view basemaps behind data in Scenes (EMME and CUBE), Animation window (DYNAMEQ), and CityPhi.
OpenPaths 2025 (25.00.01.06)
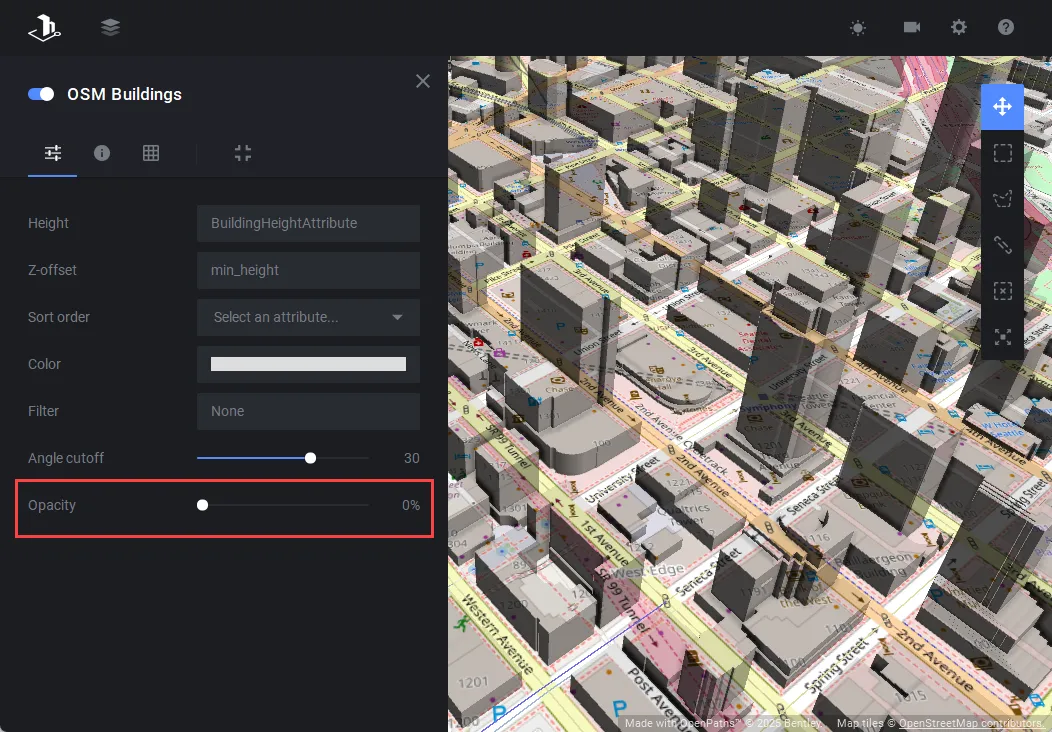
In the CityPhi example above, the Opacity parameter is set to 0% for maximum transparency. Note that basemap details including street names, points of interest and road direction arrows are now visible even through building polygons.
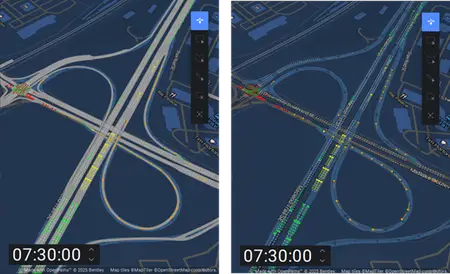
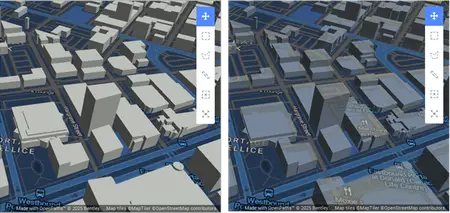
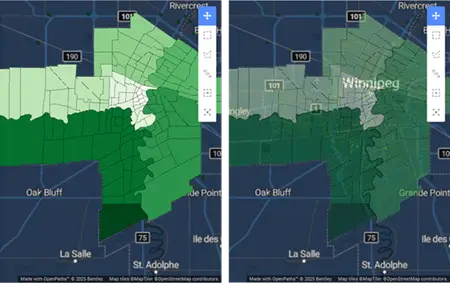
Other similar examples are presented, comparing no transparency (left-side) with transparency (right-side).
OpenPaths 2025 (25.00.01.06)
OpenPaths 2025 (25.00.01.06)
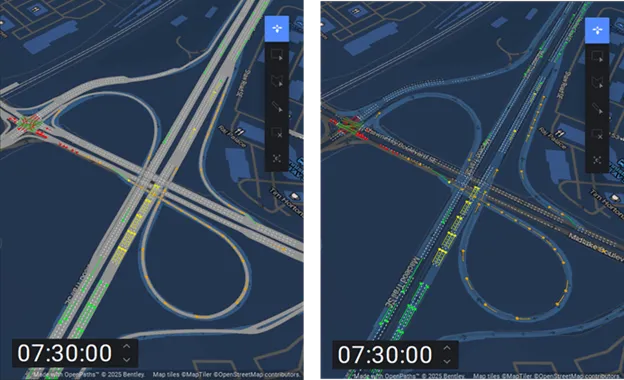
Figure 5. Animation Window (DYNAMEQ)
OpenPaths 2025 (25.00.01.06)
OpenPaths 2025 (25.00.01.06)
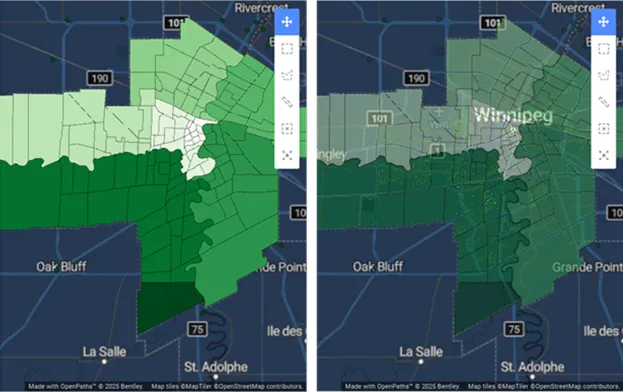
Figure 6. Scenes (EMME and CUBE)
OpenPaths 2025 (25.00.01.06)
OpenPaths 2025 (25.00.01.06)
OpenPaths 2025 (25.00.01.06)
OpenPaths 2025 (25.00.01.06)
OpenPaths delivers the most comprehensive transport modeling platform for strategic and operational transport planning. With OpenPaths you can capture a complete representation of mobility, incorporating travel demand at any level of detail from zones to individual persons, tours, and trips, and multimodal traffic on any mode from cars to public transit and beyond to answer questions about the future of mobility. OpenPaths is available in two editions, OpenPaths Advanced and OpenPaths Ultimate. Each edition offers access to applications and features tailored to your needs. During installation, you will need to configure the edition based on the specific application you intend to use.
Multimodal transport model traffic and transit flows
Bentley Systems, Inc. is the global leader dedicated to providing architects, engineers, constructors, and owner-operators with comprehensive architecture and engineering software solutions for sustaining infrastructure. Founded in 1984, Bentley has nearly 3,000 colleagues in more than 45 countries, $500 million in annual revenues, and, since 2001, has invested more than $1 billion in research, development, and acquisitions.
Owner: Bentley Systems Inc.
Product Name: OpenPaths
Version: 2025 (25.00.01.06)
Supported Architectures: x64
Website Home Page : www.bentley.com
Languages Supported: english
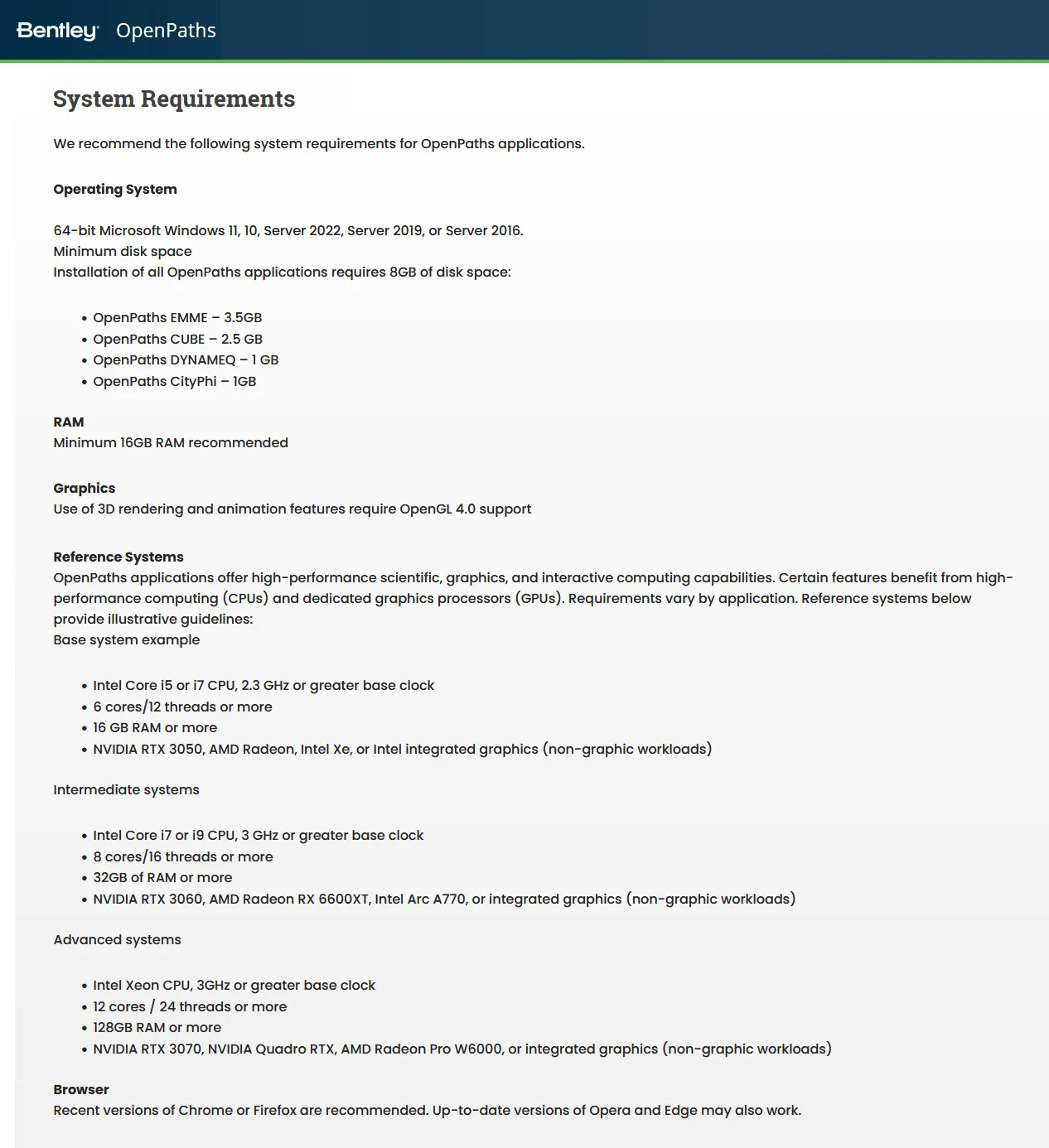
System Requirements: Windows *
Size: 2.6 Gb

OpenPaths 2025 (25.00.01.06)
Please visit my blog
Added by 3% of the overall size of the archive of information for the restoration
No mirrors please

![OpenPaths 2025 (25.00.01.06)]()
Added by 3% of the overall size of the archive of information for the restoration
No mirrors please
OpenPaths 2025 (25.00.01.06)
